
PUMA 560 Matlab Simulations
PUMA560 Simulations using Perter Corke's Robotics Toolbox for MATLAB.
This project contains a graphical user interface for robotic manipulators using the Perter Corke's Robotics Toolbox in MATLAB. I made 2 GUIs: one of them for a RRR robot manipulator (3 revolute joints), and the other one for a PUMA560.
Repository
To get a copy of this project you can use git, and clone the repository:
git clone https://github.com/leonardoward/PUMA560-MATLAB-Simulations.git
Or you can download the zip file with the project and extract it to get the files.
Prerequisites
- MATLAB (Developed using MATLAB R2015b)
- Peter Corke's Robotics Toolbox
- ARTE Library: This library contains the needed STL models for the PUMA560.
Installation
Peter Corke's Robotics Toolbox
- Download the mltbx file, this project was developed using RTB-10.3.1.
- From within the MATLAB file browser double click on this file (mltbx), it will install and configure the paths correctly.
ARTE Library (STL Models)
- Download the zip file with the ARTE Library.
- Copy the folder /path/to/arte/arte/robots/UNIMATE/, this folder contains the STL models. A copy of this folder can be found on the root path of this repository.
- Paste the folder with the STL models in the path /path/to/MATLAB/version/toolbox/phased/phased/data/ARTE/, in this case the version is R2015b.
To check that is installed correctly run in the MATLAB terminal:
> mdl_puma560
> p560.model3d
ans =
UNIMATE/puma560
RRR Robot Manipulator
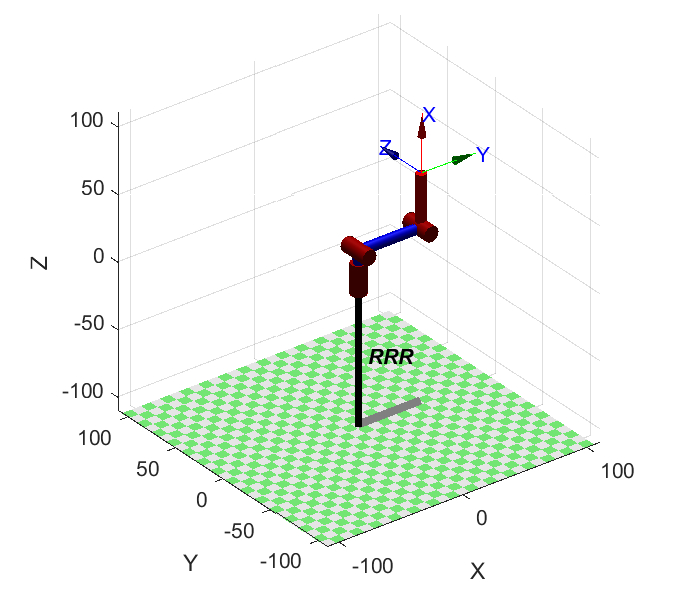
Matlab simulation of the RRR Robot Manipulator.
GUI for the RRR Robot Manipulator.
PUMA 560
Matlab simulation of the Puma 560 Robot Manipulator.
GUI for the Puma 560 Robot Manipulator.
Posted In:
Robotics