
Brushless DC Motor Drivers
This project describes the automation of a Brushless DC Motor Driver with an Arduino Uno.
The motor drivers Kelly KEB72601XF provide necessary hardware to drive brusless dc motors, but their interface is not fully digital, the interface that is presented in the user manual contains electrical components that require a manual setting (switches). In this project a circuit is designed to create a fully digital interface for the driver Kelly KEB72601XF and change the velocity and direction of brushless DC motors used in electrical Vehicle prototypes.
Kelly Controller Specifications.
Kelly Controller Connections help.

Brushless DC Motor.

Motor driver Kelly KEB72601XF.
Circuit
The manual of the controller recommends the circuit presented in the following figure to create an interface with it. In the next figure tow potentiometers and three switches are being used to accelerate (throttle), decelerate (brake) and change the direction of the motor.
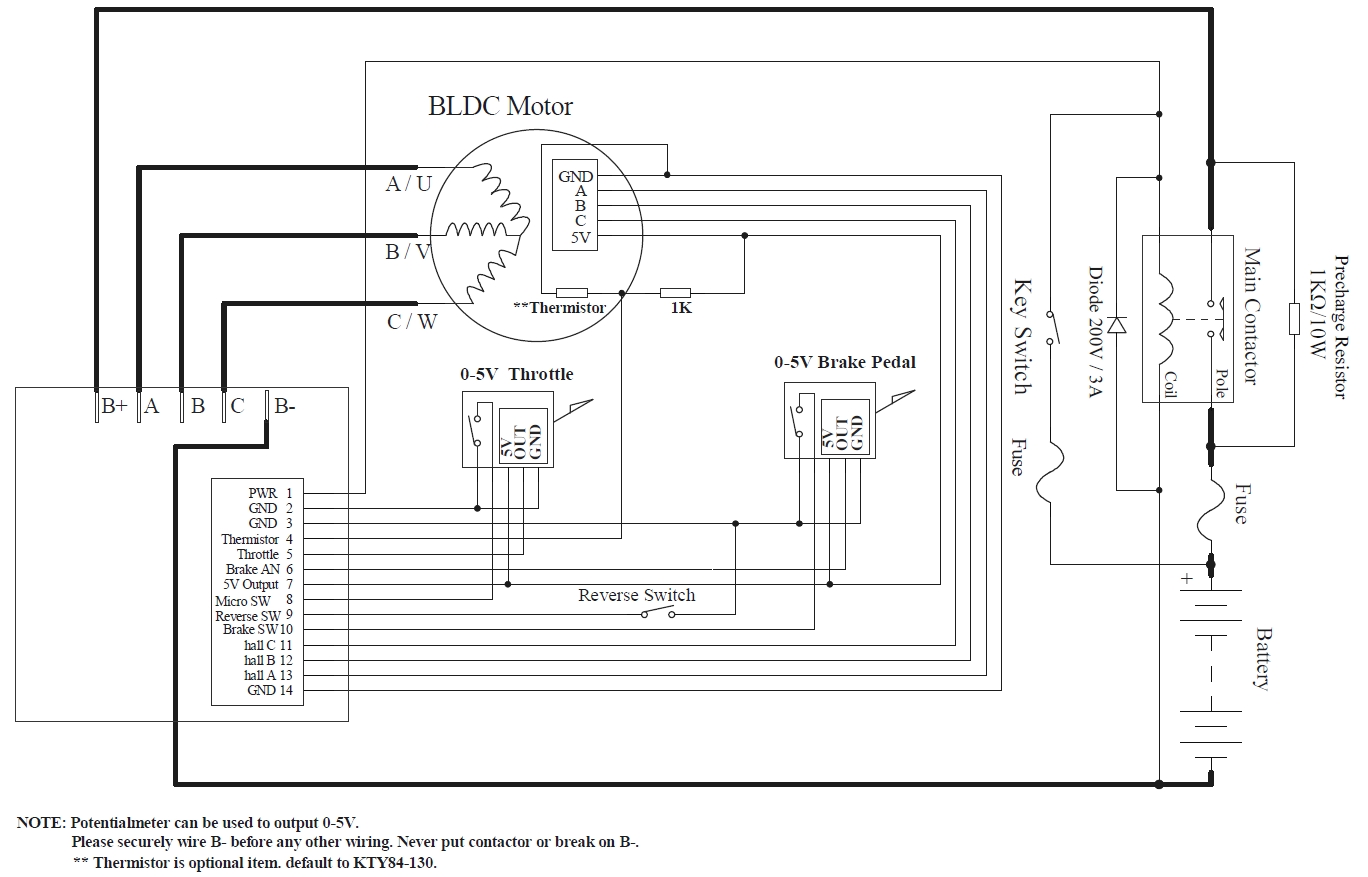
Recommended interface for the Kelly KEB72601XF.
I used three electrical relays as a replacement of the switches presented in the original circuit:
- The first one replaces the throttle switch and activates the accelerator.
- The second one replaces the brake switch and activates the decelerator.
- The third one replaces the Reverse Switch and changes the direction of rotation of the motor.
An Arduino activates the relays, and creates 3 PWM to create the analogue signals (0V-5V): Throttle and Brake AN.
The power supply is connected to the front panel of the controller. The next image presents a description of the front panel.
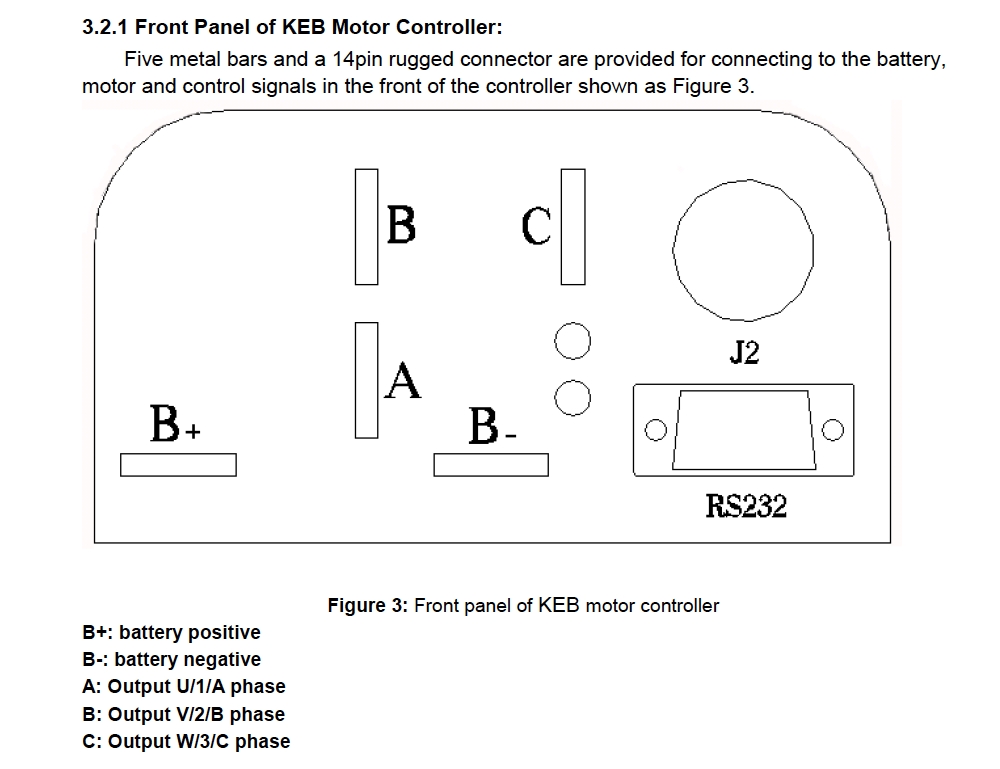
Front Panel of the Kelly KEB72601XF.
The J2 connector is used to interact with the controller using a development board (Arduino Uno), the next image describes the J2 connector.
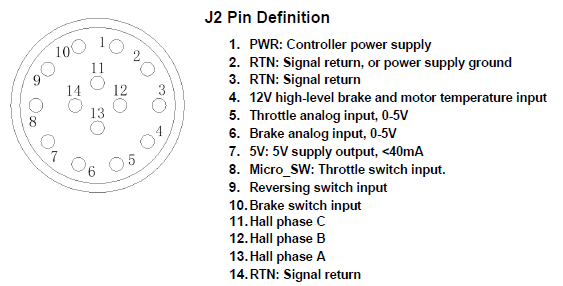
J2 Pin Description.
Testing
The next images show the designed circuit (on a breadboard). Including a computer that controls the Arduino UNO using serial communication.

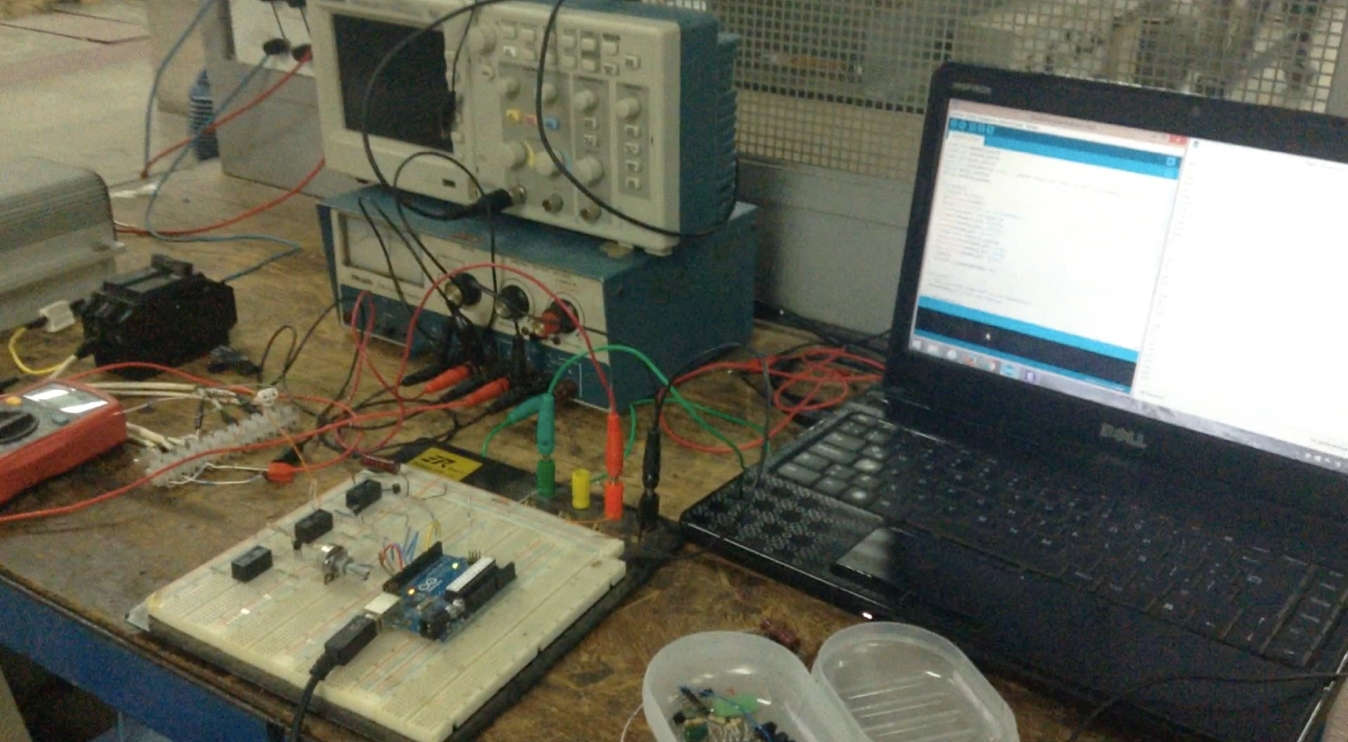
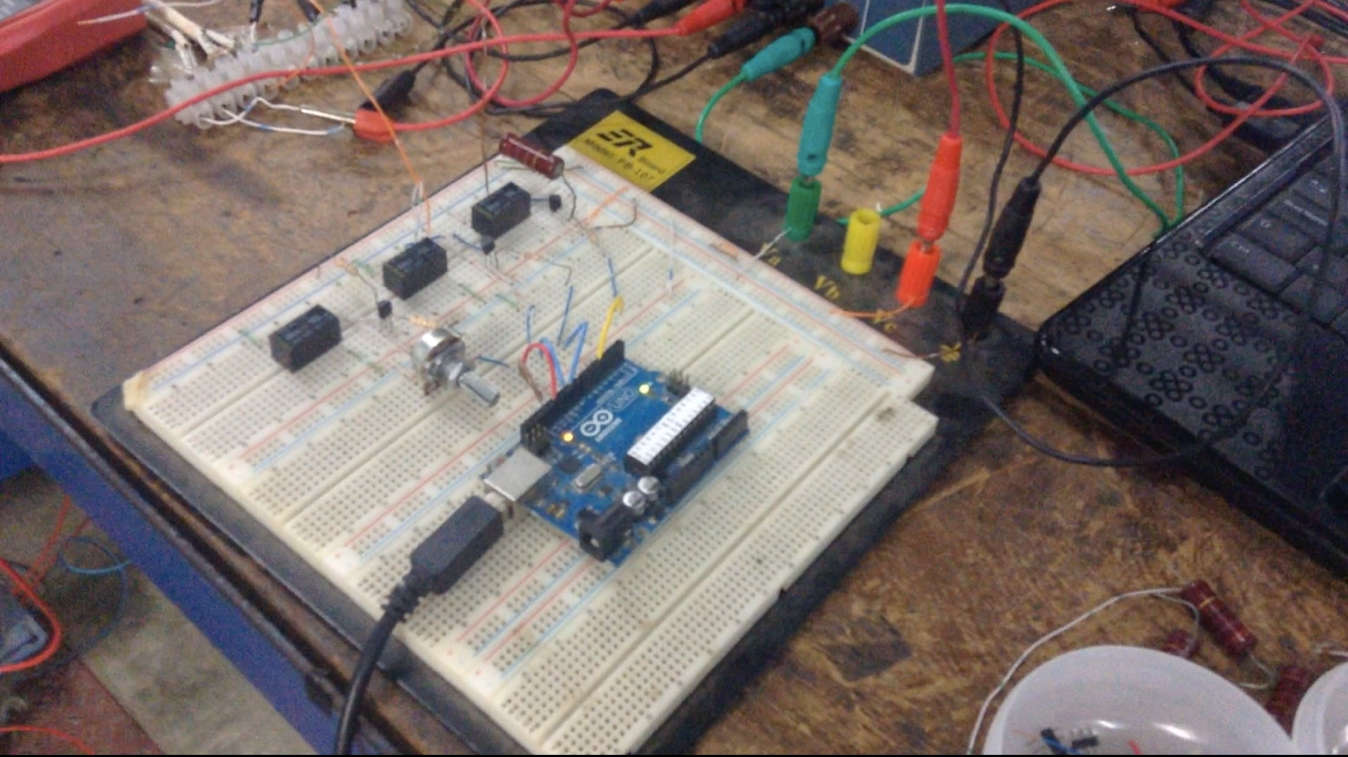
Circuit Implementation.
Posted In:
Robotics